






Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№
 Р .Рҗ. РӨилиРҝРөРҪРәРҫ
Р .Рҗ. РӨилиРҝРөРҪРәРҫ
 Рҳ.Р•. Р•СҖРјРҫлаРөРІ
Рҳ.Р•. Р•СҖРјРҫлаРөРІ
 Рқ.Р’. РҹСӮРёСҶСӢРҪ
Рқ.Р’. РҹСӮРёСҶСӢРҪ
Р—Р°РҙРөСҖР¶РәР°, РІРҪРҫСҒРёРјР°СҸ СҶРёС„СҖРҫРІРҫР№ РҝРҫРҙСҒРёСҒСӮРөРјРҫР№ РәРҫРҙРёСҖРҫРІР°РҪРёСҸ Рё РҙРөРәРҫРҙРёСҖРҫРІР°РҪРёСҸ РІРёРҙРөРҫ, РҫРіСҖР°РҪРёСҮРёРІР°РөСӮ РІРҫР·РјРҫР¶РҪРҫСҒСӮРё РҙРёСҒСӮР°РҪСҶРёРҫРҪРҪРҫРіРҫ СҒР»РөР¶РөРҪРёСҸ Р·Р° СҶРөР»СҢСҺ PTZ-РәамРөСҖРҫР№ Рё СғСҒиливаРөСӮ РҝРҫСӮСҖРөРұРҪРҫСҒСӮСҢ РІ авСӮРҫРјР°СӮРёР·Р°СҶРёРё СҒР»РөР¶РөРҪРёСҸ РҝСҖРё РҝРҫРјРҫСүРё РІСҒСӮСҖРҫРөРҪРҪРҫР№ РІРёРҙРөРҫР°РҪалиСӮРёРәРё. Р Р°СҒСҒРјРҫСӮСҖРёРј РҫСҒРҪРҫРІРҪСӢРө Р·Р°РҙР°СҮРё, РәРҫСӮРҫСҖСӢРө РјРҫР¶РҪРҫ СҖРөСҲР°СӮСҢ РҪР° РҫРұСҠРөРәСӮРө РұлагРҫРҙР°СҖСҸ авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°РҪРҪРҫРјСғ СғРҝСҖавлРөРҪРёСҺ PTZ-РәамРөСҖами, Р° СӮР°РәР¶Рө РҝСҖРҫРҙСғРәСӮСӢ, РҝСҖРөРҙлагаРөРјСӢРө СҒРөРіРҫРҙРҪСҸ РҪР° СҖСӢРҪРәРө РҙР»СҸ РёРҪСӮРөллРөРәСӮСғализаСҶРёРё PTZ-РәамРөСҖ.
Р Р°СҒСҒРјРҫСӮСҖРёРј РҫСҒРҪРҫРІРҪСӢРө Р·Р°РҙР°СҮРё, СҖРөСҲР°РөРјСӢРө РҝСҖРё авСӮРҫРјР°СӮРёР·Р°СҶРёРё СҒРёСҒСӮРөРјСӢ СғРҝСҖавлРөРҪРёСҸ PTZ-РәамРөСҖРҫР№.
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәРҫРө РҝР°СӮСҖСғлиСҖРҫРІР°РҪРёРө
Р’ СҖамРәах С„СғРҪРәСҶРёРё РҝР°СӮСҖСғлиСҖРҫРІР°РҪРёСҸ PTZ-РәамРөСҖР° СҶРёРәлиСҮРөСҒРәРё "РҫРұС…РҫРҙРёСӮ" РҝСҖРөРҙРҝРҫР·РёСҶРёРё РҪР°РұР»СҺРҙРөРҪРёСҸ, Р·Р°РҙР°РҪРҪСӢРө РҫРҝРөСҖР°СӮРҫСҖРҫРј, РҫСҒСӮР°РҪавливаРөСӮСҒСҸ РІ РәажРҙРҫР№ РҝРҫР·РёСҶРёРё РҪР° Р·Р°РҙР°РҪРҪРҫРө РІСҖРөРјСҸ Рё СӮСҖР°РҪСҒлиСҖСғРөСӮ РІРёРҙРөРҫ СҒ РІСӢРұСҖР°РҪРҪСӢРј СғРІРөлиСҮРөРҪРёРөРј. ДаРҪРҪР°СҸ С„СғРҪРәСҶРёСҸ СҸРІР»СҸРөСӮСҒСҸ СҒСӮР°РҪРҙР°СҖСӮРҪРҫР№ Рё РІСҒСӮСҖРҫРөРҪР° РҝСҖР°РәСӮРёСҮРөСҒРәРё РІРҫ РІСҒРө РјРҫРҙРөли PTZ-РәамРөСҖ.
РҹСҖРөРёРјСғСүРөСҒСӮРІРҫРј РҝР°СӮСҖСғлиСҖРҫРІР°РҪРёСҸ РҝРҫ РҝСҖРөРҙРҝРҫР·РёСҶРёСҸРј СҸРІР»СҸРөСӮСҒСҸ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҢ РҫС…РІР°СӮРёСӮСҢ РұРҫР»СҢСҲСғСҺ СӮРөСҖСҖРёСӮРҫСҖРёСҺ Рё РҝРҫР»СғСҮРёСӮСҢ РёР·РҫРұСҖажРөРҪРёСҸ РІ РәажРҙРҫР№ РҝРҫР·РёСҶРёРё СҒ С…РҫСҖРҫСҲРөР№ РҙРөСӮализаСҶРёРөР№. РқРөРҙРҫСҒСӮР°СӮРәРё С„СғРҪРәСҶРёРё вҖ“ РҪалиСҮРёРө СҒР»РөРҝРҫР№ Р·РҫРҪСӢ РІРҫ РІСҒРөС… РҝРҫР·РёСҶРёСҸС… РәСҖРҫРјРө СӮРөРәСғСүРөР№ Рё РҝРҫСҒСӮРҫСҸРҪРҪРҫРө РёР·РјРөРҪРөРҪРёРө С„РҫРҪР° СҒСҶРөРҪСӢ, СҮСӮРҫ Р·Р°СӮСҖСғРҙРҪСҸРөСӮ Р°РҪализ РёР·РҫРұСҖажРөРҪРёСҸ Р°РҪалиСӮРёРәРҫР№ Рё РҫРҝРөСҖР°СӮРҫСҖРҫРј. Р’ СҖРөжимРө РҝР°СӮСҖСғлиСҖРҫРІР°РҪРёСҸ СҒР»РҫР¶РҪРҫ СҖР°СҒРҝРҫР·РҪР°СӮСҢ РјРөРҙР»РөРҪРҪСӢРө РёР·РјРөРҪРөРҪРёСҸ СҒСҶРөРҪСӢ Р·Р° РәРҫСҖРҫСӮРәРёР№ РёРҪСӮРөСҖвал РҪахРҫР¶РҙРөРҪРёСҸ РәамРөСҖСӢ РІ РәажРҙРҫР№ РҝРҫР·РёСҶРёРё. Р•СҒли РҫРҝРөСҖР°СӮРҫСҖ РҪР°РҝСҖавлСҸРөСӮ РәамРөСҖСғ РІ РҪРөРәРҫСӮРҫСҖСғСҺ РҝРҫР·РёСҶРёСҺ, СӮРҫ СҒРҫРұСӢСӮРёСҸ, РҝСҖРҫРёСҒС…РҫРҙСҸСүРёРө РІ РҙСҖСғРіРёС… РҝРҫР·РёСҶРёСҸС…, РҪРө СҖРөРіРёСҒСӮСҖРёСҖСғСҺСӮСҒСҸ РІ РІРёРҙРөРҫР°СҖС…РёРІРө.
РҹРөСҖРөСҮРёСҒР»РөРҪРҪСӢРө РҪРөРҙРҫСҒСӮР°СӮРәРё РјРҫРіСғСӮ РұСӢСӮСҢ СғСҒСӮСҖР°РҪРөРҪСӢ РҙРҫРҝРҫР»РҪРёСӮРөР»СҢРҪРҫР№ СғСҒСӮР°РҪРҫРІРәРҫР№ РҫРұР·РҫСҖРҪСӢС… РҪРөРҝРҫРҙРІРёР¶РҪСӢС… РәамРөСҖ, РҝРҫР»РҪРҫСҒСӮСҢСҺ Р·Р°РәСҖСӢРІР°СҺСүРёС… РҫС…СҖР°РҪСҸРөРјСғСҺ СӮРөСҖСҖРёСӮРҫСҖРёСҺ. РўРҫРіРҙР° PTZ-РәамРөСҖР° РёСҒРҝРҫР»СҢР·СғРөСӮСҒСҸ РёСҒРәР»СҺСҮРёСӮРөР»СҢРҪРҫ РҙР»СҸ РҝРҫР»СғСҮРөРҪРёСҸ РҙРөСӮализиСҖРҫРІР°РҪРҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ СҶРөР»РөР№, РҫРұРҪР°СҖСғживаРөРјСӢС… РҝСҖРё РҝРҫРјРҫСүРё РҫРұР·РҫСҖРҪСӢС… РәамРөСҖ. РҹСҖРё СҚСӮРҫРј СғРІРөлиСҮРёРІР°РөСӮСҒСҸ СҒСҖРҫРә СҒР»СғР¶РұСӢ PTZ-РәамРөСҖСӢ, РҝРҫСҒРәРҫР»СҢРәСғ СғРјРөРҪСҢСҲР°РөСӮСҒСҸ РөРө РјРөС…Р°РҪРёСҮРөСҒРәР°СҸ РҪагСҖСғР·РәР°.
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәРёР№ РІСӢРұРҫСҖ СҶРөли РҙР»СҸ PTZ-СҒР»РөР¶РөРҪРёСҸ
РҳСҒСӮРҫСҮРҪРёРәами СҒРёРіРҪала РҙР»СҸ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРіРҫ РІСӢРұРҫСҖР° СҶРөли РјРҫРіСғ РұСӢСӮСҢ:
Р’РёРҙРөРҫСҒРёРіРҪал СҒ СӮРөР»РөРІРёР·РёРҫРҪРҪРҫР№ или СӮРөРҝР»РҫРІРёР·РёРҫРҪРҪРҫР№ РәамРөСҖСӢ РҫРұСҖР°РұР°СӮСӢРІР°РөСӮСҒСҸ РІРёРҙРөРҫР°РҪалиСӮРёРәРҫР№, РәРҫСӮРҫСҖР°СҸ РҙРөСӮРөРәСӮРёСҖСғРөСӮ СҶРөли Рё РҫРҝСҖРөРҙРөР»СҸРөСӮ РёС… РјРөСҒСӮРҫРҪахРҫР¶РҙРөРҪРёРө РҙР»СҸ РҪавРөРҙРөРҪРёСҸ PTZ-РәамРөСҖСӢ РұРөР· СғСҮР°СҒСӮРёСҸ РҫРҝРөСҖР°СӮРҫСҖР°. РҹСҖРёРјРөСҖ СғСҒСӮР°РҪРҫРІРәРё, РәРҫСӮРҫСҖР°СҸ СҖРөализСғРөСӮ РҙР°РҪРҪСӢР№ РҝРҫРҙС…РҫРҙ, РҝСҖРөРҙСҒСӮавлРөРҪ РҪР° СҖРёСҒ. 1.

Р•СҒли РҝСҖРёРјРөРҪСҸРөСӮСҒСҸ РҪРөСҒРәРҫР»СҢРәРҫ РҫРұР·РҫСҖРҪСӢС… РәамРөСҖ СҒ РҝРөСҖРөРәСҖСӢРІР°СҺСүРёРјРёСҒСҸ Р·РҫРҪами РҙРөР№СҒСӮРІРёСҸ, СӮРҫ Р¶РөлаСӮРөР»СҢРҪРҫ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РјРҪРҫРіРҫРәР°РҪалСҢРҪСғСҺ (РјРҪРҫРіРҫРәамРөСҖРҪСғСҺ) РІРёРҙРөРҫР°РҪалиСӮРёРәСғ1. РһСҒРҫРұРөРҪРҪРҫ важРҪР° РјРҪРҫРіРҫРәР°РҪалСҢРҪР°СҸ РІРёРҙРөРҫР°РҪалиСӮРёРәР° РҝСҖРё СҮР°СҒСӮРҫРј РҝРҫСҸРІР»РөРҪРёРё СҶРөР»РөР№. РҹРҫРІСӮРҫСҖРҪРҫРө РҙРөСӮРөРәСӮРёСҖРҫРІР°РҪРёРө СҶРөли РәажРҙРҫР№ РәамРөСҖРҫР№ РұСғРҙРөСӮ РҝСҖРёРІРҫРҙРёСӮСҢ Рә РҪРөСҚффРөРәСӮРёРІРҪРҫРјСғ РёСҒРҝРҫР»СҢР·РҫРІР°РҪРёСҺ PTZ-РәамРөСҖ Рё СҒСҖСӢвам СҒР»РөР¶РөРҪРёСҸ, СҮСӮРҫ Р·Р°СӮСҖСғРҙРҪРёСӮ СҖРөСӮСҖРҫСҒРҝРөРәСӮРёРІРҪСӢР№ Р°РҪализ Р°СҖС…РёРІР°.
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәР°СҸ СҖР°СҒСҒСӮР°РҪРҫРІРәР° РҝСҖРёРҫСҖРёСӮРөСӮРҫРІ РҙР»СҸ РҙРөСӮализаСҶРёРё Рё СҒР»РөР¶РөРҪРёСҸ
Р’ СҒР»СғСҮР°Рө, РәРҫРіРҙР° РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ СҒРёСҒСӮРөРјСӢ РҪР°РұР»СҺРҙРөРҪРёСҸ РҪахРҫРҙРёСӮСҒСҸ РҪРөСҒРәРҫР»СҢРәРҫ СҶРөР»РөР№, Р° СҮРёСҒР»Рҫ PTZ-РәамРөСҖ РҫРіСҖР°РҪРёСҮРөРҪРҫ, СӮСҖРөРұСғРөСӮСҒСҸ СҖР°СҒРҝСҖРөРҙРөР»СҸСӮСҢ Р·Р°РҙР°СҮРё РјРөР¶РҙСғ PTZ-РәамРөСҖами РҫРҝСӮималСҢРҪСӢРј РҫРұСҖазРҫРј СҒ СӮРҫСҮРәРё Р·СҖРөРҪРёСҸ РёС… важРҪРҫСҒСӮРё.
РҗлгРҫСҖРёСӮРј РјРҫР¶РөСӮ РІСӢСҮРёСҒР»СҸСӮСҢ РҝСҖРёРҫСҖРёСӮРөСӮ СҶРөли СҒ СғСҮРөСӮРҫРј РҪРөСҒРәРҫР»СҢРәРёС… РәСҖРёСӮРөСҖРёРөРІ:
Р’СҒРө РҪайРҙРөРҪРҪСӢРө СҶРөли СҒСӮавСҸСӮСҒСҸ РІ РҝСҖРёРҫСҖРёСӮРөР·РёСҖРҫРІР°РҪРҪСғСҺ РҫСҮРөСҖРөРҙСҢ2 РҙР»СҸ РҝРҫСҒР»РөРҙСғСҺСүРөР№ РҫРұСҖР°РұРҫСӮРәРё РёРҪСӮРөллРөРәСӮСғалСҢРҪРҫР№ СҒРёСҒСӮРөРјРҫР№ РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ.
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәРёР№ РІСӢРұРҫСҖ PTZ-РәамРөСҖСӢ
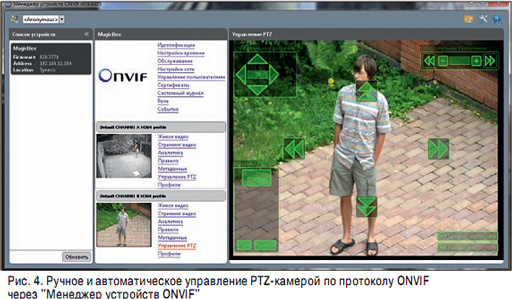
РҗлгРҫСҖРёСӮРј РҙРҫлжРөРҪ Р·Р°РұРёСҖР°СӮСҢ СҶРөли РёР· РҝСҖРёРҫСҖРёСӮРөР·РёСҖРҫРІР°РҪРҪРҫР№ РҫСҮРөСҖРөРҙРё РІ РҝРҫСҖСҸРҙРәРө РёС… важРҪРҫСҒСӮРё Рё СҖР°СҒРҝСҖРөРҙРөР»СҸСӮСҢ РјРөР¶РҙСғ РҙРҫСҒСӮСғРҝРҪСӢРјРё PTZ-РәамРөСҖами СҒ СғСҮРөСӮРҫРј взаимРҪРҫРіРҫ СҖР°СҒРҝРҫР»РҫР¶РөРҪРёСҸ СҶРөР»РөР№ Рё РҙРҫСҒСӮСғРҝРҪСӢС… РәамРөСҖ. Р’ СҖР°РұРҫСӮСғ алгРҫСҖРёСӮРјР° РјРҫР¶РөСӮ РІРјРөСҲР°СӮСҢСҒСҸ РҫРҝРөСҖР°СӮРҫСҖ, РҝРҫРҙР°СҺСүРёР№ РәРҫРјР°РҪРҙСӢ РҪР° PTZ-РәамРөСҖСғ СҒ РҝРҫРјРҫСүСҢСҺ РҙР¶РҫР№СҒСӮРёРәР° или РҝСҖРҫРіСҖаммРҪРҫРіРҫ РёРҪСӮРөСҖС„РөР№СҒР° (СҖРёСҒ. 4). Р’ СҚСӮРҫРј СҒР»СғСҮР°Рө алгРҫСҖРёСӮРј РҙРҫлжРөРҪ Р·Р°РҙРөР№СҒСӮРІРҫРІР°СӮСҢ РҙСҖСғРіРёРө PTZ-РәамРөСҖСӢ РҙР»СҸ СҒР»РөР¶РөРҪРёСҸ Р·Р° СҶРөР»СҸРјРё, РҫСҒСӮавСҲРёРјРёСҒСҸ РұРөР· РІРҪРёРјР°РҪРёСҸ РҫРҝРөСҖР°СӮРҫСҖР°.
РқР° СҒР»РҫР¶РҪСӢС… РҫРұСҠРөРәСӮах РҪРөРҫРұС…РҫРҙРёРјРҫ РҝСҖРёРјРөРҪРөРҪРёРө СӮСҖРөС…РјРөСҖРҪСӢС… РјРҫРҙРөР»РөР№ РҫС…СҖР°РҪСҸРөРјРҫРіРҫ РҫРұСҠРөРәСӮР° Рё Р·РҫРҪ РҙРөР№СҒСӮРІРёСҸ РәамРөСҖ3.
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәРҫРө РҪавРөРҙРөРҪРёРө PTZ-РәамРөСҖСӢ
Р’ РҝСҖРҫСҒСӮРөР№СҲРөРј СҒР»СғСҮР°Рө алгРҫСҖРёСӮРј РҪавРөРҙРөРҪРёСҸ РјРҫР¶РөСӮ РұСӢСӮСҢ СҖРөализРҫРІР°РҪ РҝСҖРё РҝРҫРјРҫСүРё РјРҪРҫРіРҫР·РҫРҪРҪРҫРіРҫ РҙРөСӮРөРәСӮРҫСҖР° РҙРІРёР¶РөРҪРёСҸ РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ: РәР°РҙСҖ СҖазРұРёРІР°РөСӮСҒСҸ РҪР° РјРҪРҫР¶РөСҒСӮРІРҫ Р·РҫРҪ, РәажРҙР°СҸ РёР· РәРҫСӮРҫСҖСӢС… Р°СҒСҒРҫСҶРёРёСҖСғРөСӮСҒСҸ СҒ РҝСҖРөРҙРҝРҫР·РёСҶРёСҸРјРё PTZ-РәамРөСҖСӢ. РҹСҖРё СҒСҖР°РұР°СӮСӢРІР°РҪРёРё РҙРөСӮРөРәСӮРҫСҖР° РҙРІРёР¶РөРҪРёСҸ РІ Р·РҫРҪРө (СҖРёСҒ. 2)

PTZ-РәамРөСҖР° РҝРөСҖРөРІРҫРҙРёСӮСҒСҸ РІ СҒРҫРҫСӮРІРөСӮСҒСӮРІСғСҺСүСғСҺ РҝСҖРөРҙРҝРҫР·РёСҶРёСҺ (СҖРёСҒ. 4). Р§РөРј РұРҫР»СҢСҲРө Р·РҫРҪ Р·Р°РҙР°РөСӮСҒСҸ РҝСҖРё РҪР°СҒСӮСҖРҫР№РәРө, СӮРөРј РұРҫР»СҢСҲРөРө СғРІРөлиСҮРөРҪРёРө РјРҫР¶РҪРҫ РҝРҫР»СғСҮРёСӮСҢ РҪР° PTZ-РәамРөСҖРө. РқРөРҙРҫСҒСӮР°СӮРәРҫРј РҙР°РҪРҪРҫРіРҫ РҝРҫРҙС…РҫРҙР° СҸРІР»СҸСҺСӮСҒСҸ РҪРөСғСҒСӮРҫР№СҮРёРІР°СҸ СҖР°РұРҫСӮР° РҝСҖРё РҪалиСҮРёРё РҪРөСҒРәРҫР»СҢРәРёС… СҶРөР»РөР№ Рё РҫРіСҖР°РҪРёСҮРөРҪРёСҸ СӮРҫСҮРҪРҫСҒСӮРё РҪавРөРҙРөРҪРёСҸ, СҒРІСҸР·Р°РҪРҪСӢРө СҒ РІСӢРұСҖР°РҪРҪСӢРјРё РҝСҖРөРҙРҝРҫР·РёСҶРёСҸРјРё PTZ-РәамРөСҖСӢ. РқР° РҫРұСҠРөРәСӮРө СҒ РұРҫР»СҢСҲРёРј РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРҫРј РҪР°РұР»СҺРҙРөРҪРёСҸ Рё Р·РҪР°СҮРёСӮРөР»СҢРҪСӢРј СҮРёСҒР»РҫРј РәамРөСҖ СҖРөРәРҫРјРөРҪРҙСғРөСӮСҒСҸ Р°РҪалиСӮРёСҮРөСҒРәРҫРө РҝСҖРөРҫРұСҖазРҫРІР°РҪРёРө РәРҫРҫСҖРҙРёРҪР°СӮ РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ РІ СҒРёСҒСӮРөРјСғ РәРҫРҫСҖРҙРёРҪР°СӮ РҝРҫРІРҫСҖРҫСӮРҪРҫР№ РәамРөСҖСӢ РұРөР· СҖазРҙРөР»РөРҪРёСҸ РәР°РҙСҖРҫРІ РҪР° Р·РҫРҪСӢ (СҖРёСҒ. 3 Рё 4).
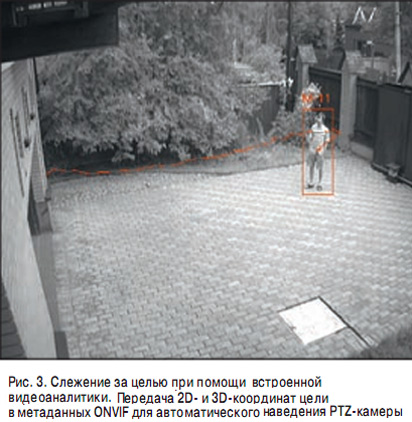
РЎРІСҸР·СҢ РјРөР¶РҙСғ РҫРұР·РҫСҖРҪРҫР№ Рё СғРҝСҖавлСҸРөРјРҫР№ РәамРөСҖРҫР№ РјРҫР¶РөСӮ РұСӢСӮСҢ СғСҒСӮР°РҪРҫРІР»РөРҪР° СҮРөСҖРөР· РіР»РҫРұалСҢРҪСғСҺ СҒРёСҒСӮРөРјСғ РәРҫРҫСҖРҙРёРҪР°СӮ СҖРөалСҢРҪРҫРіРҫ РјРёСҖР°, Рә РәРҫСӮРҫСҖРҫР№ РҝСҖРёРІСҸР·СӢРІР°СҺСӮСҒСҸ РІСҒРө РәамРөСҖСӢ4.
РўРҫСҮРҪРҫСҒСӮСҢ РҝСҖРөРҫРұСҖазРҫРІР°РҪРёСҸ РёР· РҙРІСғРјРөСҖРҪРҫР№ СҒРёСҒСӮРөРјСӢ РәРҫРҫСҖРҙРёРҪР°СӮ РәР°РҙСҖР° РІ СӮСҖРөС…РјРөСҖРҪРҫРө РҝСҖРҫСҒСӮСҖР°РҪСҒСӮРІРҫ СҖРөалСҢРҪРҫРіРҫ РјРёСҖР° РҫРіСҖР°РҪРёСҮРёРІР°РөСӮ РҝСҖРёРұлижРөРҪРёРө PTZ-РәамРөСҖСӢ, РҝРҫСҒРәРҫР»СҢРәСғ РІ СҒР»СғСҮР°Рө РҫСҲРёРұРәРё РҝСҖРөРҫРұСҖазРҫРІР°РҪРёСҸ РҝСҖРё СҒРёР»СҢРҪРҫРј СғРІРөлиСҮРөРҪРёРё РҫРұСҠРөРәСӮ РјРҫР¶РөСӮ РҫРәазаСӮСҢСҒСҸ РІРҪРө РҝРҫР»СҸ Р·СҖРөРҪРёСҸ. РҹРҫСҚСӮРҫРјСғ РҫСҒРҫРұРөРҪРҪСӢРө СӮСҖРөРұРҫРІР°РҪРёСҸ РҝСҖРөРҙСҠСҸРІР»СҸСҺСӮСҒСҸ Рә РІРёРҙРөРҫР°РҪалиСӮРёРәРө РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ: РҪРөРҫРұС…РҫРҙРёРјР° РәР°СҮРөСҒСӮРІРөРҪРҪР°СҸ Р»РҫРәализаСҶРёСҸ (СҒРөРіРјРөРҪСӮРёСҖРҫРІР°РҪРёРө) СҶРөли Рё РәР°СҮРөСҒСӮРІРөРҪРҪР°СҸ РәалиРұСҖРҫРІРәР° РҙР»СҸ СҒРІСҸР·Рё РөРіРҫ РәРҫРҫСҖРҙРёРҪР°СӮ СҒ РҝРҫРІРҫСҖРҫСӮРҪРҫР№ РәамРөСҖРҫР№.
РҗРІСӮРҫРјР°СӮРёСҮРөСҒРәРҫРө СҒР»РөР¶РөРҪРёРө Р·Р° СҶРөР»СҢСҺ
РҹРҫСҒР»Рө СӮРҫРіРҫ РәР°Рә PTZ-РәамРөСҖР° РҪавРөРҙРөРҪР° РҪР° СҶРөР»СҢ, Р¶РөлаСӮРөР»СҢРҪРҫ РҝСҖРёРјРөРҪРөРҪРёРө алгРҫСҖРёСӮРјРҫРІ СҒР»РөР¶РөРҪРёСҸ РҙР»СҸ РҫСӮРҫРұСҖажРөРҪРёСҸ Рё Р·Р°РҝРёСҒРё СҶРөР»РҫСҒСӮРҪРҫРіРҫ С„СҖагмРөРҪСӮР° РІРёРҙРөРҫ СҶРөли, СҒРҫРҝСҖРҫРІРҫР¶РҙР°РөРјРҫР№ PTZ-РәамРөСҖРҫР№. Р’ РҝСҖРҫСҶРөСҒСҒРө РҪР°СҒСӮСҖРҫР№РәРё алгРҫСҖРёСӮРјР° СҒР»РөР¶РөРҪРёСҸ РҝСҖРёС…РҫРҙРёСӮСҒСҸ РёСҒРәР°СӮСҢ РәРҫРјРҝСҖРҫРјРёСҒСҒ РјРөР¶РҙСғ СҒСӮРөРҝРөРҪСҢСҺ СғРІРөлиСҮРөРҪРёСҸ (Рё СҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫ, РҙРөСӮализаСҶРёРөР№) СҶРөли Рё СҮР°СҒСӮРҫСӮРҫР№ СҒРјРөСүРөРҪРёР№ PTZ-РәамРөСҖСӢ. Р§РөРј СҒРёР»СҢРҪРөРө СғРІРөлиСҮРөРҪРёРө, СӮРөРј СҮР°СүРө РҝСҖРёС…РҫРҙРёСӮСҒСҸ РҝРөСҖРөРҙРІРёРіР°СӮСҢ РәамРөСҖСғ.
Р Р°СҒРҝСҖРҫСҒСӮСҖР°РҪРөРҪРҪСӢРө РҪР° СҖСӢРҪРәРө PTZ-РәамРөСҖСӢ РҪРө РҝРҫР·РІРҫР»СҸСҺСӮ РҝлавРҪРҫ РҝРҫРІРҫСҖР°СҮРёРІР°СӮСҢ РәамРөСҖСғ СҒ РҝРөСҖРөРјРөРҪРҪРҫР№ СҒРәРҫСҖРҫСҒСӮСҢСҺ. РҹСҖРё СҲагРҫРІРҫРј СҒРјРөСүРөРҪРёРё РҝРҫР»РҫР¶РөРҪРёСҸ PTZ-РәамРөСҖСӢ РёР·РҫРұСҖажРөРҪРёРө РҙРөСҖРіР°РөСӮСҒСҸ Рё СҒмазСӢРІР°РөСӮСҒСҸ. РҹРҫСҚСӮРҫРјСғ С…РҫСҖРҫСҲРёР№ алгРҫСҖРёСӮРј СҒР»РөР¶РөРҪРёСҸ РҙРҫлжРөРҪ РјРёРҪРёРјРёР·РёСҖРҫРІР°СӮСҢ РәРҫлиСҮРөСҒСӮРІРҫ СҒРјРөСүРөРҪРёР№ РәамРөСҖСӢ РҙР»СҸ Р·Р°РҙР°РҪРҪРҫРіРҫ СғРІРөлиСҮРөРҪРёСҸ. РҗлгРҫСҖРёСӮРј СҒР»РөР¶РөРҪРёСҸ РҙРҫлжРөРҪ РәРҫСҖСҖРөРәСӮРҪРҫ СҖР°РұРҫСӮР°СӮСҢ РІ СҒР»СғСҮР°Рө РІСҖРөРјРөРҪРҪРҫРіРҫ взаимРҪРҫРіРҫ РҝРөСҖРөРәСҖСӢСӮРёСҸ СҶРөР»РөР№, РҪР°РҝСҖРёРјРөСҖ РөСҒли Р»СҺРҙРё РёРҙСғСӮ РҪавСҒСӮСҖРөСҮСғ РҙСҖСғРі РҙСҖСғРіСғ4, 5.
PTZ-cР»РөР¶РөРҪРёРө Р·Р° СҶРөР»СҢСҺ РјРҫР¶РөСӮ РҫСҒСғСүРөСҒСӮРІР»СҸСӮСҢСҒСҸ СӮСҖРөРјСҸ СҒРҝРҫСҒРҫРұами:
РҡажРҙСӢР№ РёР· СҒРҝРҫСҒРҫРұРҫРІ РёРјРөРөСӮ СҒРІРҫРё РҝСҖРөРёРјСғСүРөСҒСӮРІР° Рё РҪРөРҙРҫСҒСӮР°СӮРәРё, СҒСҖавРҪРөРҪРёСҺ РәРҫСӮРҫСҖСӢС… РјСӢ РҝРҫСҒРІСҸСӮРёРј РҫСӮРҙРөР»СҢРҪСғСҺ РҝСғРұлиРәР°СҶРёСҺ.
РҗлгРҫСҖРёСӮРј СҒамРҫСҒР»РөР¶РөРҪРёСҸ СғРҙРҫРұРөРҪ РІ СҒР»СғСҮР°Рө, РәРҫРіРҙР° РҫРҝРөСҖР°СӮРҫСҖ Р·Р°РҙР°РөСӮ СҶРөР»СҢ РІСҖСғСҮРҪСғСҺ, Р° РҫРұР·РҫСҖРҪР°СҸ РәамРөСҖР° РҫСӮСҒСғСӮСҒСӮРІСғРөСӮ или РҪРө РІРёРҙРёСӮ СҶРөР»СҢ. РҗлгРҫСҖРёСӮРј РІРҪРөСҲРҪРөРіРҫ СҒР»РөР¶РөРҪРёСҸ РұРҫР»РөРө СғСҒСӮРҫР№СҮРёРІРҫ СҖР°РұРҫСӮР°РөСӮ РҝСҖРё РҪалиСҮРёРё РҪРөСҒРәРҫР»СҢРәРёС… СҶРөР»РөР№. РҹСҖРё СҖавРҪСӢС… СғСҒР»РҫРІРёСҸС… СҖазлиСҮРёРјРҫСҒСӮРё РҫРұСҠРөРәСӮРҫРІ алгРҫСҖРёСӮРјСӢ СҒР»РөР¶РөРҪРёСҸ РҪР° РҝРҫРҙРІРёР¶РҪРҫР№ РәамРөСҖРө СҖР°РұРҫСӮР°СҺСӮ С…СғР¶Рө, СҮРөРј РҪР° РҪРөРҝРҫРҙРІРёР¶РҪРҫР№, СӮР°Рә РәР°Рә РІ РҝРҫСҒР»РөРҙРҪРөРј СҒР»СғСҮР°Рө алгРҫСҖРёСӮРј РјРҫР¶РөСӮ Р»СғСҮСҲРө Р°РҙР°РҝСӮРёСҖРҫРІР°СӮСҢСҒСҸ Рә РҪРөРҝРҫРҙРІРёР¶РҪРҫРјСғ С„РҫРҪСғ.
Р’ СӮРөРҫСҖРёРё РіРёРұСҖРёРҙРҪСӢР№ СҒРҝРҫСҒРҫРұ РҙРҫлжРөРҪ РҫРұРөСҒРҝРөСҮРёСӮСҢ РҪаиРұРҫР»РөРө СғСҒСӮРҫР№СҮРёРІРҫРө СҒР»РөР¶РөРҪРёРө РІРҫ РІСҒРөС… СҒРёСӮСғР°СҶРёСҸС…, РҪРҫ РІ РёР·РІРөСҒСӮРҪСӢС… РҪам СҒРёСҒСӮРөмах РҫРҪ РҝРҫРәР° РҪРө СҖРөализРҫРІР°РҪ.
РЎР»РөР¶РөРҪРёРө Р·Р° СҶРөР»СҢСҺ РҝСҖРё РҝРҫРјРҫСүРё РҝСҖРёРІРҫРҙР° PTZ вҖ“ Р·Р°РҙР°СҮР° СҖРөалСҢРҪРҫРіРҫ РјР°СҒСҲСӮР°РұР° РІСҖРөРјРөРҪРё, СҮСғРІСҒСӮРІРёСӮРөР»СҢРҪР°СҸ Рә Р·Р°РҙРөСҖР¶РәРө. Р•СҒли РҫРұСүР°СҸ Р·Р°РҙРөСҖР¶РәР° РІРёРҙРөРҫ РІ IP-СҒРөСӮРё РҝСҖРөРІСӢСҲР°РөСӮ 500 РјСҒ (РҝРҫР»РҫРІРёРҪР° СҒРөРәСғРҪРҙСӢ), СӮРҫ СҚффРөРәСӮРёРІРҪРҫ СғРҝСҖавлСҸСӮСҢ РәамРөСҖРҫР№ РҪРө РјРҫР¶РөСӮ РҪРё РҫРҝРөСҖР°СӮРҫСҖ, РҪРё СҒРөСҖРІРөСҖРҪР°СҸ РІРёРҙРөРҫР°РҪалиСӮРёРәР°. РҡР°Рә РҝСҖавилРҫ, РҫРәРҫР»Рҫ 300 РјСҒ РІРҪРҫСҒРёСӮСҒСҸ РҝРөСҖРөРҙР°СҺСүРёРј СғСҒСӮСҖРҫР№СҒСӮРІРҫРј (РәамРөСҖРҫР№ или РәРҫРҙРөСҖРҫРј) Рё РҫРәРҫР»Рҫ 100 РјСҒ РІРҪРҫСҒРёСӮСҒСҸ VMS-СҒРёСҒСӮРөРјРҫР№, РҙРөРәРҫРҙРёСҖСғСҺСүРөР№ РІРёРҙРөРҫ.
РҡР°СҮРөСҒСӮРІРөРҪРҪРҫРө СҒР»РөР¶РөРҪРёРө Р·Р° РҫРұСҠРөРәСӮРҫРј РјРҫР¶РөСӮ РұСӢСӮСҢ СҖРөализРҫРІР°РҪРҫ РҝСҖРё Р»РҫРәалСҢРҪРҫР№ РҫРұСҖР°РұРҫСӮРәРө РІРёРҙРөРҫ РҙРҫ РәРҫРјРҝСҖРөСҒСҒРёРё. Р’ СҚСӮРҫРј СҒР»СғСҮР°Рө РәРҫРҫСҖРҙРёРҪР°СӮСӢ СҶРөли РјРҫРіСғСӮ РұСӢСӮСҢ СҖР°СҒСҒСҮРёСӮР°РҪСӢ РҝРҫ РҙР°РҪРҪСӢРј РҫРұР·РҫСҖРҪРҫР№ или PTZ-РәамРөСҖСӢ Р·Р° 20вҖ“40 РјСҒ. РўР°РәР°СҸ СҒРёСҒСӮРөРјР° РјРҫР¶РөСӮ СҒРҫРҝСҖРҫРІРҫР¶РҙР°СӮСҢ РұСӢСҒСӮСҖРҫ РҝРөСҖРөРјРөСүР°СҺСүРёРөСҒСҸ СҶРөли вҖ“ РҪР°РҝСҖРёРјРөСҖ РұРөРіСғСүРөРіРҫ СҮРөР»РҫРІРөРәР° или РҙРІРёР¶СғСүРөРөСҒСҸ СӮСҖР°РҪСҒРҝРҫСҖСӮРҪРҫРө СҒСҖРөРҙСҒСӮРІРҫ вҖ“ РҪР° С…РҫСҖРҫСҲРөРј СғРІРөлиСҮРөРҪРёРё.
РқР°СҮРёРҪР°СҸ СҒ РІРөСҖСҒРёРё 1.02, РјРөР¶РҙСғРҪР°СҖРҫРҙРҪСӢР№ СҒСӮР°РҪРҙР°СҖСӮ ONVIF РҝРҫР·РІРҫР»СҸРөСӮ СҒСӮСҖРҫРёСӮСҢ СғРҪифиСҶРёСҖРҫРІР°РҪРҪСӢРө СҖРөСҲРөРҪРёСҸ РҙР»СҸ авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРіРҫ Рё СҖСғСҮРҪРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ PTZ-РәамРөСҖами. Р’ СҮР°СҒСӮРҪРҫСҒСӮРё, СҒСӮР°РҪРҙР°СҖСӮ РҫРҝРёСҒСӢРІР°РөСӮ РәРҫРјР°РҪРҙСӢ СғРҝСҖавлРөРҪРёСҸ Рё СҒСҮРёСӮСӢРІР°РҪРёСҸ РҝРҫР»РҫР¶РөРҪРёСҸ PTZ-РәамРөСҖСӢ, СҒРёСҒСӮРөРјСӢ РәРҫРҫСҖРҙРёРҪР°СӮ, Р° СӮР°РәР¶Рө С„РҫСҖРјР°СӮ РҝРөСҖРөРҙР°СҮРё РјРөСӮР°РҙР°РҪРҪСӢС… Рҫ РҝРҫРҙРІРёР¶РҪСӢС… РҫРұСҠРөРәСӮах СҒ РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ РІ СҒРёСҒСӮРөРјСғ СғРҝСҖавлРөРҪРёСҸ РІРёРҙРөРҫ (VMS) Рё/или РёРҪСӢРө СғСҒСӮСҖРҫР№СҒСӮРІР° РҙР»СҸ СғРҝСҖавлРөРҪРёСҸ PTZ-РәамРөСҖРҫР№.
РҹСҖРёРјРөРҪРөРҪРёРө РёРҪСӮРөллРөРәСӮСғалСҢРҪСӢС… С„СғРҪРәСҶРёР№ PTZ РІ РҫРұСүРөСҒСӮРІРөРҪРҪСӢС… РјРөСҒСӮах РҫРіСҖР°РҪРёСҮРөРҪРҫ РІРҫР·РјРҫР¶РҪРҫСҒСӮСҸРјРё РІРёРҙРөРҫР°РҪалиСӮРёРәРё СҒР»РөР¶РөРҪРёСҸ. РЎРөРіРҫРҙРҪСҸ РҪР° СҖСӢРҪРәРө РҪРө СҒСғСүРөСҒСӮРІСғРөСӮ РІРёРҙРөРҫР°РҪалиСӮРёРәРё, СҒРҝРҫСҒРҫРұРҪРҫР№ СҒРҫРҝСҖРҫРІРҫР¶РҙР°СӮСҢ СҮРөР»РҫРІРөРәР° РІ СӮРҫР»РҝРө РұРөР· РҝСҖРёРјРөРҪРөРҪРёСҸ РҙРөСӮРөРәСӮРҫСҖР° лиСҶ РҪР° РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖРө.
Р•СҒли СҖазСҖРөСҲР°СҺСүР°СҸ СҒРҝРҫСҒРҫРұРҪРҫСҒСӮСҢ Рё СғРіРҫР» РҪР°РұР»СҺРҙРөРҪРёСҸ РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ РҝРҫР·РІРҫР»СҸСҺСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ РҙРөСӮРөРәСӮРҫСҖ лиСҶ, СӮРҫ РІРҫР·РјРҫР¶РҪР° авСӮРҫРјР°СӮРёР·Р°СҶРёСҸ РҪавРөРҙРөРҪРёСҸ PTZ-РәамРөСҖСӢ РҙР»СҸ РұРҫР»РөРө СӮРҫСҮРҪРҫРіРҫ СҖР°СҒРҝРҫР·РҪаваРҪРёСҸ лиСҶ Рё Р·Р°РҝРёСҒРё РҙРөСӮализиСҖРҫРІР°РҪРҪРҫРіРҫ РёР·РҫРұСҖажРөРҪРёСҸ. РҹСҖРё СҚСӮРҫРј РҪРөРҫРұС…РҫРҙРёРјР° СҖРөализаСҶРёСҸ СҒРёСҒСӮРөРјСӢ СҒР»РөР¶РөРҪРёСҸ РҝРҫ РҙР°РҪРҪСӢРј РҙРөСӮРөРәСӮРҫСҖР° лиСҶ, СҮСӮРҫРұСӢ РҫРҝСӮРёРјРёР·РёСҖРҫРІР°СӮСҢ СҖР°РұРҫСӮСғ PTZ-РәамРөСҖСӢ РҙР»СҸ РҪСғР¶РҪРҫРіРҫ СҒСҶРөРҪР°СҖРёСҸ, РҪР°РҝСҖРёРјРөСҖ РҙР»СҸ СҒР»РөР¶РөРҪРёСҸ Р·Р° РҫРҙРҪРёРј СҮРөР»РҫРІРөРәРҫРј или РҙР»СҸ РұСӢСҒСӮСҖРҫРіРҫ СҒРәР°РҪРёСҖРҫРІР°РҪРёСҸ РІСҒРөС… лиСҶ РІ РҝРҫР»Рө Р·СҖРөРҪРёСҸ.
Р‘РҫР»СҢСҲРёРҪСҒСӮРІРҫ PTZ-РәамРөСҖ, РҝСҖРөРҙСҒСӮавлРөРҪРҪСӢС… РҪР° СҖСӢРҪРәРө, СҒ РёРҪСӮРөСҖС„РөР№СҒами Pelco D (РҙР»СҸ РҝРҫСҒР»РөРҙРҫРІР°СӮРөР»СҢРҪРҫРіРҫ РёРҪСӮРөСҖС„РөР№СҒР° RS-422/485) или ONVIF (РҙР»СҸ IP-СҒРөСӮРё) РҪРө РёРјРөСҺСӮ РҫРұСҖР°СӮРҪРҫР№ СҒРІСҸР·Рё СҒ СҒРёСҒСӮРөРјРҫР№ СғРҝСҖавлРөРҪРёСҸ, РІ СҮР°СҒСӮРҪРҫСҒСӮРё РҪРөРІРҫР·РјРҫР¶РҪРҫ Р·Р°РҝСҖРҫСҒРёСӮСҢ СӮРөРәСғСүСғСҺ РҝРҫР·РёСҶРёСҺ РәамРөСҖСӢ Рё СғСҒСӮР°РҪРҫРІРёСӮСҢ РәамРөСҖСғ РҝРҫ Р°РұСҒРҫР»СҺСӮРҪСӢРј РәРҫРҫСҖРҙРёРҪР°СӮам. РӯСӮРҫ РҫРіСҖР°РҪРёСҮРөРҪРёРө РҪРө РҝРҫР·РІРҫР»СҸРөСӮ РёСҒРҝРҫР»СҢР·РҫРІР°СӮСҢ PTZ-РәамРөСҖСғ РҙР»СҸ СҒР»РөР¶РөРҪРёСҸ РҝРҫ РәРҫРҫСҖРҙРёРҪР°СӮам РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ.
1. Р’ РјРҫРҙСғР»Рө TRASSIR ActiveDome РәРҫРјРҝР°РҪРёРё DSSL СҖРөализРҫРІР°РҪР° С„СғРҪРәСҶРёСҸ PTZ-СҒР»РөР¶РөРҪРёСҸ СҒ Р°РҪалиСӮРёСҮРөСҒРәРёРј РҝСҖРөРҫРұСҖазРҫРІР°РҪРёРөРј РәРҫРҫСҖРҙРёРҪР°СӮ. Р’ РәР°РҙСҖРө РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ Р·Р°РҙР°РөСӮСҒСҸ РҫРұлаСҒСӮСҢ, РәРҫСӮРҫСҖР°СҸ РҝСғСӮРөРј РҝСҖРҫСҶРөРҙСғСҖСӢ РәалиРұСҖРҫРІРәРё СҒРҫР·РҙР°РөСӮ СҒРІСҸР·СҢ РәРҫРҫСҖРҙРёРҪР°СӮ СҒ РҝРҫРІРҫСҖРҫСӮРҪРҫР№ РІРёРҙРөРҫРәамРөСҖРҫР№.
РҹРҫ РёРҪС„РҫСҖРјР°СҶРёРё РҫСӮ СҖазСҖР°РұРҫСӮСҮРёРәР°, РәРҫлиСҮРөСҒСӮРІРҫ РҫРұР·РҫСҖРҪСӢС… РәамРөСҖ РІ СҒРёСҒСӮРөРјРө РІРёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёСҸ РјРҫР¶РөСӮ РұСӢСӮСҢ РҪРөРҫРіСҖР°РҪРёСҮРөРҪРҪСӢРј Рё СҒРІСҸР·Р°РҪРҪСӢРј СҒ СҖазмРөСҖРҫРј РәРҫРҪСӮСҖРҫлиСҖСғРөРјРҫР№ Р·РҫРҪСӢ. РқР°РҝСҖРёРјРөСҖ, СҮСӮРҫРұСӢ РҫРұРөСҒРҝРөСҮРёСӮСҢ РҫРұР·РҫСҖ РІ 360 РіСҖР°Рҙ., СҖРөРәРҫРјРөРҪРҙСғРөСӮСҒСҸ СғСҒСӮР°РҪРҫРІРёСӮСҢ 4 РҫРұР·РҫСҖРҪСӢРө Рё 1 РҝРҫРІРҫСҖРҫСӮРҪСғСҺ РәамРөСҖСӢ.
2. Р’ РҝСҖРҫРҙСғРәСӮРө "РҳРҪСӮРөллРөРәСӮ" РәРҫРјРҝР°РҪРёРё ITV | AxxonSoft РјРҫР¶РөСӮ РұСӢСӮСҢ СҖРөализРҫРІР°РҪРҫ PTZ-СҒР»РөР¶РөРҪРёРө РҝСҖРё РҝРҫРјРҫСүРё РјРҪРҫРіРҫР·РҫРҪРҪРҫРіРҫ РҙРөСӮРөРәСӮРҫСҖР° РҙРІРёР¶РөРҪРёСҸ РҫРұР·РҫСҖРҪРҫР№ РәамРөСҖСӢ РұРөР· авСӮРҫРјР°СӮРёР·Р°СҶРёРё РҝСҖРҫСҶРөСҒСҒР° РәалиРұСҖРҫРІРәРё. ДлСҸ СҚСӮРҫРіРҫ РҪРөРҫРұС…РҫРҙРёРјРҫ РІСӢРҝРҫР»РҪРёСӮСҢ СҲаги:
ДлСҸ PTZ-СҒР»РөР¶РөРҪРёСҸ РІ СғСҒР»РҫРІРёСҸС… РҙРІРёР¶РөРҪРёСҸ РҙРІСғС… Рё РұРҫР»РөРө СҶРөР»РөР№ РҪРөРҫРұС…РҫРҙРёРјР° СҖРөализаСҶРёСҸ РұРҫР»РөРө СҒР»РҫР¶РҪРҫР№ Р»РҫРіРёРәРё РҝСҖРё РҝРҫРјРҫСүРё СҒРәСҖРёРҝСӮР° или РәРҫРјРҝРҫРҪРөРҪСӮР° ActiveX.
3. РҡРҫРјРҝР°РҪРёСҸ "РЎРёРҪРөР·РёСҒ" СҖР°РұРҫСӮР°РөСӮ РҪР°Рҙ СҖРөализаСҶРёРөР№ PTZ-СҒР»РөР¶РөРҪРёСҸ СҒ РјРҪРҫРіРҫР·РҫРҪРҪСӢРј РҙРөСӮРөРәСӮРҫСҖРҫРј РҙРІРёР¶РөРҪРёСҸ Рё Р°РҪалиСӮРёСҮРөСҒРәРёРј РҝСҖРөРҫРұСҖазРҫРІР°РҪРёРөРј РәРҫРҫСҖРҙРёРҪР°СӮ РІ РІРёРҙРөРҫР°РҪалиСӮРёСҮРөСҒРәРҫРј СғСҒСӮСҖРҫР№СҒСӮРІРө MagicBox. Р’ СӮРөРәСғСүРөР№ РІРөСҖСҒРёРё РҝСҖРҫСҲРёРІРәРё СғСҒСӮСҖРҫР№СҒСӮРІР° РҝРөСҖРөРҙР°СҮР° РјРөСӮР°РҙР°РҪРҪСӢС… СҒ РәРҫРҫСҖРҙРёРҪР°СӮами СҶРөР»РөР№ Рё СғРҝСҖавлРөРҪРёСҸ РҝСҖРёРІРҫРҙРҫРј PTZ РҫСҒСғСүРөСҒСӮРІР»СҸРөСӮСҒСҸ РІ СҖамРәах РјРөР¶РҙСғРҪР°СҖРҫРҙРҪРҫРіРҫ СҒСӮР°РҪРҙР°СҖСӮР° ONVIF, СҮСӮРҫ РҝРҫР·РІРҫР»СҸРөСӮ СҖРөализРҫРІР°СӮСҢ РІРҪРөСҲРҪСҺСҺ Р»РҫРіРёРәСғ СғРҝСҖавлРөРҪРёСҸ PTZ-РәамРөСҖСӢ. РҹСҖРёР»РҫР¶РөРҪРёРө "РңРөРҪРөРҙР¶РөСҖ СғСҒСӮСҖРҫР№СҒСӮРІ ONVIF"6 СҖР°СҒРҝСҖРҫСҒСӮСҖР°РҪСҸРөРјРҫРө РІ РҫСӮРәСҖСӢСӮРҫРј РәРҫРҙРө, иллСҺСҒСӮСҖРёСҖСғРөСӮ взаимРҫРҙРөР№СҒСӮРІРёРө РәлиРөРҪСӮР° ONVIF СҒ PTZ-РәамРөСҖРҫР№ Рё РІРёРҙРөРҫР°РҪалиСӮРёСҮРөСҒРәРёРј СҒРөСҖРІРёСҒРҫРј (СҖРёСҒ. 4).
РқР°СҖСҸРҙСғ СҒ РҝРөСҖРөСҮРёСҒР»РөРҪРҪСӢРјРё РҫСӮРөСҮРөСҒСӮРІРөРҪРҪСӢРјРё РҝСҖРҫРҙСғРәСӮами СҒСғСүРөСҒСӮРІСғСҺСӮ СҒРёСҒСӮРөРјСӢ PTZ-СҒР»РөР¶РөРҪРёСҸ Р·Р°СҖСғРұРөР¶РҪСӢС… РҝРҫСҒСӮавСүРёРәРҫРІ, РәРҫСӮРҫСҖСӢРө РҪР° СҖРҫСҒСҒРёР№СҒРәРҫРј СҖСӢРҪРәРө РІСҒСӮСҖРөСҮР°СҺСӮСҒСҸ СҖРөРҙРәРҫ.
РўРөС…РҪРҫР»РҫРіРёРё авСӮРҫРјР°СӮРёСҮРөСҒРәРҫРіРҫ СғРҝСҖавлРөРҪРёСҸ СҖРҫРұРҫСӮРёР·РёСҖРҫРІР°РҪРҪРҫР№ PTZ-РәамРөСҖРҫР№ РҪР° РҫСҒРҪРҫРІРө РҙР°РҪРҪСӢС… РІРёРҙРөРҫР°РҪалиСӮРёРәРё Рё РҙСҖСғРіРёС… СҒРөРҪСҒРҫСҖРҫРІ РҪахРҫРҙСҸСӮСҒСҸ РҪР° СҖР°РҪРҪРөРј СҚСӮР°РҝРө СҒРІРҫРөРіРҫ СҖазвиСӮРёСҸ. РқР° СҖРҫСҒСҒРёР№СҒРәРҫРј СҖСӢРҪРәРө РҝСҖРөРҙСҒСӮавлРөРҪСӢ VMS-СҒРёСҒСӮРөРјСӢ РәРҫРјРҝР°РҪРёР№ DSSL Рё ITV | AxxonSoft, Р° СӮР°РәР¶Рө авСӮРҫРҪРҫРјРҪРҫРө СғСҒСӮСҖРҫР№СҒСӮРІРҫ MagicBox РәРҫРјРҝР°РҪРёР№ "РҗРіСҖРөРіР°СӮРҫСҖ" Рё "РЎРёРҪРөР·РёСҒ", РҝРҫР·РІРҫР»СҸСҺСүРёРө авСӮРҫРјР°СӮРёР·РёСҖРҫРІР°СӮСҢ СҖР°РұРҫСӮСғ PTZ-РәамРөСҖСӢ.
РһСӮРјРөСӮРёРј РҝРөСҖСҒРҝРөРәСӮРёРІРҪСӢРө РҪР°РҝСҖавлРөРҪРёСҸ РҙР»СҸ СҒРҫРІРөСҖСҲРөРҪСҒСӮРІРҫРІР°РҪРёСҸ СҚСӮРёС… РҝСҖРҫРҙСғРәСӮРҫРІ:
РһРҝСғРұлиРәРҫРІР°РҪРҫ: Р–СғСҖРҪал "РЎРёСҒСӮРөРјСӢ РұРөР·РҫРҝР°СҒРҪРҫСҒСӮРё" #4, 2011
РҹРҫСҒРөСүРөРҪРёР№: 18483
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
РҗРІСӮРҫСҖ
| |||
Р’ СҖСғРұСҖРёРәСғ "Р’РёРҙРөРҫРҪР°РұР»СҺРҙРөРҪРёРө (CCTV)" | Рҡ СҒРҝРёСҒРәСғ СҖСғРұСҖРёРә | Рҡ СҒРҝРёСҒРәСғ авСӮРҫСҖРҫРІ | Рҡ СҒРҝРёСҒРәСғ РҝСғРұлиРәР°СҶРёР№




